Short comment. More...
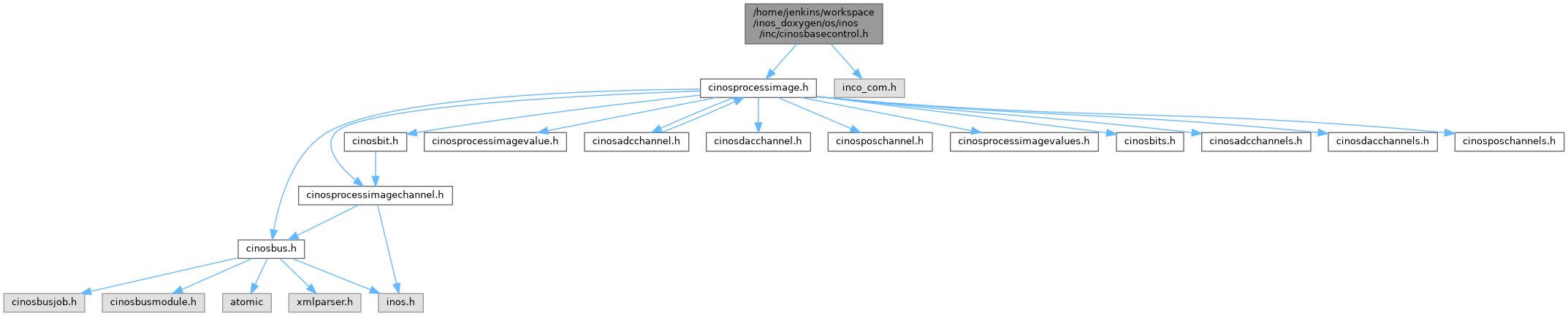
Go to the source code of this file.
Classes | |
| struct | SINOSBaseControl |
| Descriptor structure used to configure a controller. It is usually defined in a corresponding xxx.xxxctrl.dt2 configuration file. see also Control. More... | |
| class | CINOSBaseControl |
| class | CINOSRegisterBaseControl |
Macros | |
| #define | DF_INOS_BASE_CONTROL_DBT "INOS-BASE-CONTROL" |
| #define | DF_INOS_CONTROL_STATE_PEACE 0 |
| #define | DF_INOS_CONTROL_STATE_ACTIVATING 1 |
| #define | DF_INOS_CONTROL_STATE_ACTIVE 2 |
| #define | DF_INOS_CONTROL_STATE_INACTIVATING 3 |
| #define | DF_INOS_CONTROL_SUBSTATE_ACTIVE_HALT 0 |
| #define | DF_INOS_CONTROL_SUBSTATE_ACTIVE_RUN 1 |
| #define | DF_INOS_CONTROL_SUBSTATE_ACTIVE_UMOVE 2 |
| #define | ER_INOS_BASE_CONTROL_MCROBOT_ERROR_BASE 0x00000000 |
| #define | ER_INOS_GSB_CONTROL_MCROBOT_ERROR_BASE 0x40031300 |
| #define | ER_INOS_SL2_CONTROL_MCROBOT_ERROR_BASE 0x40032300 |
| #define | ER_INOS_HSSI_CONTROL_MCROBOT_ERROR_BASE 0x40033300 |
| #define | ER_INOS_CONTROL_POSCHK 0x00000001 |
| #define | ER_INOS_CONTROL_POSOVR 0x00000002 |
| #define | ER_INOS_CONTROL_OSCICHK 0x00000004 |
| #define | ER_INOS_CONTROL_ENBMISSING 0x00000008 |
| #define | ER_INOS_CONTROL_HOMEFAILED 0x00000010 |
| #define | ER_INOS_CONTROL_SAFE_SYNCFAILED 0x00000020 |
| #define | ER_INOS_CONTROL_WATCHDOG 0x00000040 |
| #define | ER_INOS_CONTROL_POWER_FAILURE 0x00000080 |
| #define | ER_INOS_CONTROL_POSCHN 0x00001000 |
| #define | ER_INOS_CONTROL_ACTIVATE 0x00002000 |
| #define | ER_INOS_CONTROL_EXTERN 0x00004000 |
| #define | ER_INOS_CONTROL_OFFLINE 0x00008000 |
| #define | WR_INOS_CONTROL_INTLIMIT 0x00000001 |
| #define | WR_INOS_CONTROL_FSLIMIT 0x00000002 |
| #define | WR_INOS_CONTROL_EXTERN 0x00004000 |
| #define | DF_INOS_BASE_CONTROL_FLAG_CHK_POS 0x00000001 |
| #define | DF_INOS_BASE_CONTROL_FLAG_SIM_POS 0x00000002 |
| #define | DF_INOS_BASE_CONTROL_FLAG_SIM_OUT 0x00000004 |
| #define | DF_INOS_BASE_CONTROL_FLAG_SIM_ACT 0x00000008 |
| #define | DF_INOS_BASE_CONTROL_FLAG_ENB_NRD 0x00000010 |
| #define | DF_INOS_BASE_CONTROL_FLAG_DEAD_INC 0x00000020 |
| #define | DF_INOS_BASE_CONTROL_FLAG_ENB_SYN 0x00000040 |
| #define | DF_INOS_BASE_CONTROL_FLAG_ENB_NRM 0x00000080 |
| #define | DF_INOS_BASE_CONTROL_FLAG_POS_OVRS 0x00000100 |
| #define | DF_INOS_BASE_CONTROL_FLAG_FFV_100 0x00000200 |
| #define | DF_INOS_BASE_CONTROL_FLAG_NO_PID 0x00000400 |
| #define | DF_INOS_BASE_CONTROL_FLAG_POS_ABS 0x00000800 |
| #define | DF_INOS_BASE_CONTROL_FLAG_NO_MPE 0x00001000 |
| #define | DF_INOS_BASE_CONTROL_FLAG_POSEX 0x00002000 |
| #define | DF_INOS_BASE_CONTROL_FLAG_INIT_V_ADJ_DIS 0x00004000 |
| #define | DF_INOS_BASE_CONTROL_FLAG_DEAD_INC2 0x00008000 |
| #define | DF_INOS_BASE_CONTROL_FLAG_LIFETIME 0x00010000 |
| #define | DF_INOS_BASE_CONTROL_FLAG_NRM_POS 0x00020000 |
| #define | DF_INOS_BASE_CONTROL_FLAG_DISTANCE_CODED_CALIB 0x00040000 |
| #define | DF_INOS_BASE_CONTROL_FLAG_INC_FRACT 0x00080000 |
| #define | DF_INOS_BASE_CONTROL_FLAG_POWER 0x00100000 |
| #define | DF_INOS_BASE_CONTROL_FLAG_ENB_SAFE_SYNC 0x40000000 |
| #define | DF_INOS_BASE_CONTROL_FLAG_DIS_SERR 0x80000000 |
| #define | DF_INOS_BASE_CONTROL_OPT_DEAD_INC 0x00000001 |
| #define | DF_INOS_BASE_CONTROL_OPT_POS_OVRS 0x00000002 |
| #define | DF_INOS_BASE_CONTROL_OPT_FFV_100 0x00000004 |
| #define | DF_INOS_BASE_CONTROL_OPT_NO_PID 0x00000008 |
| #define | DF_INOS_BASE_CONTROL_OPT_POS_ABS 0x00000010 |
| #define | DF_INOS_BASE_CONTROL_OPT_NO_MPE 0x00000020 |
| #define | DF_INOS_BASE_CONTROL_OPT_POSEX 0x00000040 |
| #define | DF_INOS_BASE_CONTROL_OPT_INIT_V_ADJ_DIS 0x00000080 |
| #define | DF_INOS_BASE_CONTROL_OPT_DEAD_INC2 0x00000100 |
| #define | DF_INOS_BASE_CONTROL_OPT_DISTANCE_CODED_CALIB 0x00000200 |
| #define | DF_INOS_BASE_CONTROL_OPT_CUSTOMER1_SYNC_INTERFACE 0x00000400 |
| #define | DF_INOS_BASE_CONTROL_OPT_LIMIT_OUT 0x00000800 |
| #define | DF_INOS_BASE_CONTROL_OPT_IGNORE_CYCLEID 0x00001000 |
| #define | DF_INOS_BASE_CONTROL_OPT_INC_FRACT 0x00002000 |
| #define | DF_INOS_BASE_CONTROL_OPT_EXT_POS_ERR 0x00004000 |
| #define | DF_INOS_BASE_CONTROL_OPT_POWER_FAILURE 0x00008000 |
| #define | INOS_BASECONTROL_UPDATE_CMD_BUFFER() |
Typedefs | |
| typedef CINOSBaseControl *(* | TCreateControl) (const char *apAxisName) |
Detailed Description
Short comment.
- Copyright
- Copyright © 2016 Indel AG. All rights reserved.
- This software is licensed on a non-exclusive basis for use on Indel products only. If the Source Code has been provided by Indel, the software may be modified or further developed, exclusively for the use on Indel's products. For evaluation purposes of the aforementioned development or modification of the software, the software may temporarily be used on third party products. Any further use of this software, its modification or development on non-Indel products is strictly prohibited.
- Remarks
project : language : GNU C++ system :
Long comment on this file.
Macro Definition Documentation
◆ DF_INOS_BASE_CONTROL_OPT_CUSTOMER1_SYNC_INTERFACE
| #define DF_INOS_BASE_CONTROL_OPT_CUSTOMER1_SYNC_INTERFACE 0x00000400 |
Support the sync-handling for 'customer1' axes
◆ DF_INOS_BASE_CONTROL_OPT_DEAD_INC
| #define DF_INOS_BASE_CONTROL_OPT_DEAD_INC 0x00000001 |
Add dead time caused by the "fieldbus delays" (cycletime + fieldbustime + residual). Resulting Deadtime = DeadTime (from dt2 file) + "fieldbus delays"
◆ DF_INOS_BASE_CONTROL_OPT_DEAD_INC2
| #define DF_INOS_BASE_CONTROL_OPT_DEAD_INC2 0x00000100 |
Add dead time caused by the "fieldbus delays" by another formula (0.5*cycletime + fieldbustime + residual). Resulting Deadtime = DeadTime (from dt2 file) + "fieldbus delays"
◆ DF_INOS_BASE_CONTROL_OPT_DISTANCE_CODED_CALIB
| #define DF_INOS_BASE_CONTROL_OPT_DISTANCE_CODED_CALIB 0x00000200 |
One needs to activate this option if the axis has a distance coded measurement system and the axis is going to be calibrated using the Motion.Calib mechanism.
◆ DF_INOS_BASE_CONTROL_OPT_EXT_POS_ERR
| #define DF_INOS_BASE_CONTROL_OPT_EXT_POS_ERR 0x00004000 |
Extended position error calculation. Enables a more precise position error calculation if the controller deadtime is much higher than the controller cycletime (e.g. with laser scanner axes).
◆ DF_INOS_BASE_CONTROL_OPT_FFV_100
| #define DF_INOS_BASE_CONTROL_OPT_FFV_100 0x00000004 |
Commanded speed value to external controller is 100% based This is mandatory for GinLink and LocalBus based axes
◆ DF_INOS_BASE_CONTROL_OPT_IGNORE_CYCLEID
| #define DF_INOS_BASE_CONTROL_OPT_IGNORE_CYCLEID 0x00001000 |
Ignore cycleid of controller inputs and outputs. Setting this option, allows cycleid's of control inputs/outpts to be different from the main cycletime/category
◆ DF_INOS_BASE_CONTROL_OPT_INC_FRACT
| #define DF_INOS_BASE_CONTROL_OPT_INC_FRACT 0x00002000 |
Fractional increments support
◆ DF_INOS_BASE_CONTROL_OPT_INIT_V_ADJ_DIS
| #define DF_INOS_BASE_CONTROL_OPT_INIT_V_ADJ_DIS 0x00000080 |
Do not adjust axis init speed even if DF_INOS_BASE_CONTROL_OPT_FFV_100 is disabled. (only on InfoLink based systems)
◆ DF_INOS_BASE_CONTROL_OPT_LIMIT_OUT
| #define DF_INOS_BASE_CONTROL_OPT_LIMIT_OUT 0x00000800 |
Obey control output limits, e.g. Min/Max of actual range in XML for DAC. Introduced as opt-in to ensure compatibility for customers that may live on the limits not being checked...
◆ DF_INOS_BASE_CONTROL_OPT_NO_MPE
| #define DF_INOS_BASE_CONTROL_OPT_NO_MPE 0x00000020 |
Without master position error. Do not send master position (maspos) error to controller. Use this option if you want to have the control algorithm on the fieldbus master side
◆ DF_INOS_BASE_CONTROL_OPT_NO_PID
| #define DF_INOS_BASE_CONTROL_OPT_NO_PID 0x00000008 |
No pid calculation. Implicitly set if DF_INOS_BASE_CONTROL_OPT_FFV_100 is used and DF_INOS_BASE_CONTROL_OPT_NO_MPE is not used
◆ DF_INOS_BASE_CONTROL_OPT_POS_ABS
| #define DF_INOS_BASE_CONTROL_OPT_POS_ABS 0x00000010 |
Position channel contains absolute encoder positions, e.g. used during axis init
◆ DF_INOS_BASE_CONTROL_OPT_POS_OVRS
| #define DF_INOS_BASE_CONTROL_OPT_POS_OVRS 0x00000002 |
Enable position channel overrun detection (only on InfoLink based systems)
◆ DF_INOS_BASE_CONTROL_OPT_POSEX
| #define DF_INOS_BASE_CONTROL_OPT_POSEX 0x00000040 |
Support 2nd position channel (PositionEx). Usually enabled if a 2nd position measurment system is available
◆ DF_INOS_BASE_CONTROL_OPT_POWER_FAILURE
| #define DF_INOS_BASE_CONTROL_OPT_POWER_FAILURE 0x00008000 |
Setting this option enables power failure supervision.
◆ INOS_BASECONTROL_UPDATE_CMD_BUFFER
| #define INOS_BASECONTROL_UPDATE_CMD_BUFFER | ( | ) |